#机器人
MIT 教授探索类人智能的奥秘
MIT副教授Phillip Isola通过心理物理学实验与视频预测等生成模型,探索人类如何直觉理解物理世界、推断物体功能并预测事件;其研究强调AI与人类认知的双向启发,旨在揭示智能本质的多样性。

Figure 宣布 Go-Big 项目,构建全球最大的人形机器人预训练数据集
Figure启动Go-Big项目,利用Brookfield超十万住宅采集的真实人类生活视频,构建全球最大人形机器人预训练数据集。Helix仅凭人类视角视频即实现零样本导航与自然语言驱动的灵巧操作一体化控制,显著提升家庭场景泛化能力与适应性。

π0.5:迈向开放世界泛化机器人的基础模型
π0.5是Physical Intelligence推出的视觉-语言-行动(VLA)基础模型,通过多源异质数据协同训练,显著提升机器人在全新家庭环境中的泛化能力。它能理解物理操作与任务语义,完成清洁、整理等复杂长程任务,仅需约100个训练环境即可接近定制化训练效果,降低对海量场景数据的依赖。

工业智能化转型:AI 与数字孪生引领制造业未来
AI与数字孪生正推动制造业从“试错”转向“预见”:工业元宇宙实现设备互联与实时预测;虚拟工程师辅助设计,仿真技术加速研发;机器人通过sim-to-real双向学习提升自主性,降低对人工编程依赖。

川崎重工发布新型机器座骑:CORLEO
川崎重工在关西世博会发布氢动力四足机器人座骑CORLEO,灵感源自摩托车设计,通过骑手重心偏移实现自然操控;搭载150cc氢引擎与独立驱动机械腿,可越野越障、跳跃障碍;配备HUD实时显示氢量与稳定性,目前为概念验证阶段。
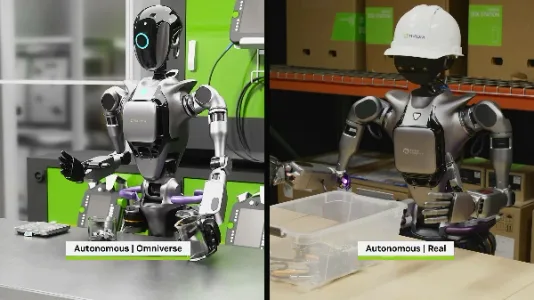
英伟达推出通用机器人开发平台:Isaac GROOT
英伟达发布通用机器人平台Isaac GROOT,核心模型GROOT N1采用仿人“快慢双系统”架构:慢系统负责感知推理与规划,快系统专注精准执行;依托Omniverse与Cosmos生成海量合成数据,突破动作控制数据瓶颈,支持跨环境、跨形态泛化及后期训练。
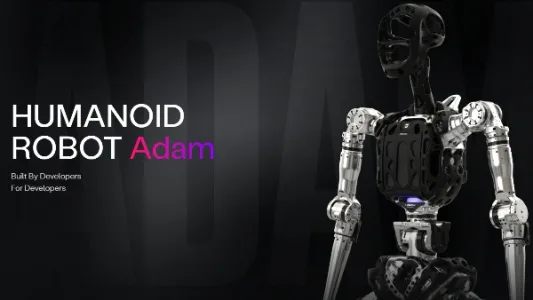
来自国产初创公司 Pndbotics 的智能人形机器人:Adam
国产初创公司Pndbotics发布人形机器人Adam系列,含25自由度的Adam Lite与41自由度的Adam SP,均高1.67米、峰值扭矩360N·m;支持基于NVIDIA Isaac Gym的并行深度强化学习训练,强调模块化设计与开放开发能力,面向科研与算法验证场景。
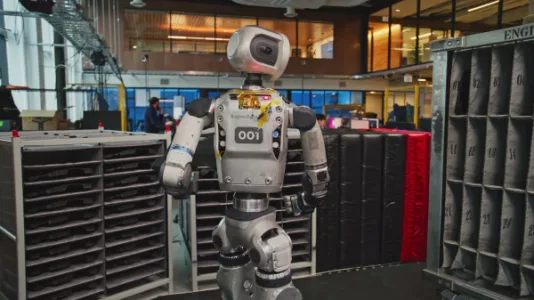
波士顿动力 Atlas 机器人的华丽转身
波士顿动力发布全电动版Atlas机器人,告别液压系统,更紧凑、清洁、高效;已落地汽车发动机盖分拣等实际任务,依托多源数据训练与AI增强,具备环境感知、自主纠错和泛化能力,标志人形机器人从炫技迈向实用化的关键转折。

AR 眼镜牵手机器人:当人类视角成为智能启蒙
佐治亚理工学院用Meta Project Aria AR眼镜采集人类第一视角数据(视觉、手部动作、空间定位),让机器人模仿人类交互方式;更将AR眼镜直接装在机器人身上,提升其环境感知与自然响应能力。低门槛的数据采集推动协作式具身智能发展。