#具身智能
软体机器人的神经蓝图:类人智能的新探索
新加坡-麻省理工联合研究团队研发了一套受人类大脑启发的 AI 控制系统,采用双重突触架构,使软体机器人首次在单一框架内实现跨任务泛化、即时环境适应与稳定性保障三大核心能力。测试显示跟踪误差降低 44%至 55%,形状精度超 92%,为软体机器人在医疗、物流、工业等领域的实用化应用奠定基础。

这家仿真初创公司想成为物理 AI 领域的 Cursor
# 仿真工具能否解锁物理智能时代 物理智能发展受限于物理空间数据匮乏,企业自建测试场地成本高昂。 Antioch 公司通过构建高保真仿真环境,帮助机器人在数字世界获取足量训练数据,缩小“仿真到现实”差距。完成 850 万美元种子轮融资,估值 6000 万美元。 MIT 研究员已利用该平台测试 AI 模型设计的机器人。仿真工具正从“可选项”变为“必选项”,有望成为物理智能领域的基础设施。

Physical Intelligence 推出新型机器人大脑,可完成从未学习过的任务
Physical Intelligence 发布新模型π0.7 ,实现机器人从“专才”到“通才”的跨越。该模型具备组合泛化能力,能整合不同语境习得的技能解决从未显式训练过的任务,如用电饭煲烹饪红薯。模型可响应分步骤口头指令在新环境中实时优化,但仍难以自主执行高层复杂指令。π0.7 的成功率对提示方式敏感,团队认为未来泛化能力增长有望超越线性规模。公司目前估值 56 亿美元,正洽谈新一轮融资,估值或达 110 亿美元。

Google DeepMind 发布 Gemini Robotics-ER 1.6
Google DeepMind 发布 Gemini Robotics-ER 1.6 推理模型,强化机器人的空间感知和物理推理能力。该版本与 Boston Dynamics 合作开发,支持解读模拟仪器读数,可通过 API 集成使用,在精准指向和物理任务检测方面优于前代。这标志着大语言模型正从“理解指令”向“落地执行”迈进,物理智能体有望从实验室走向更广泛的工业应用场景。
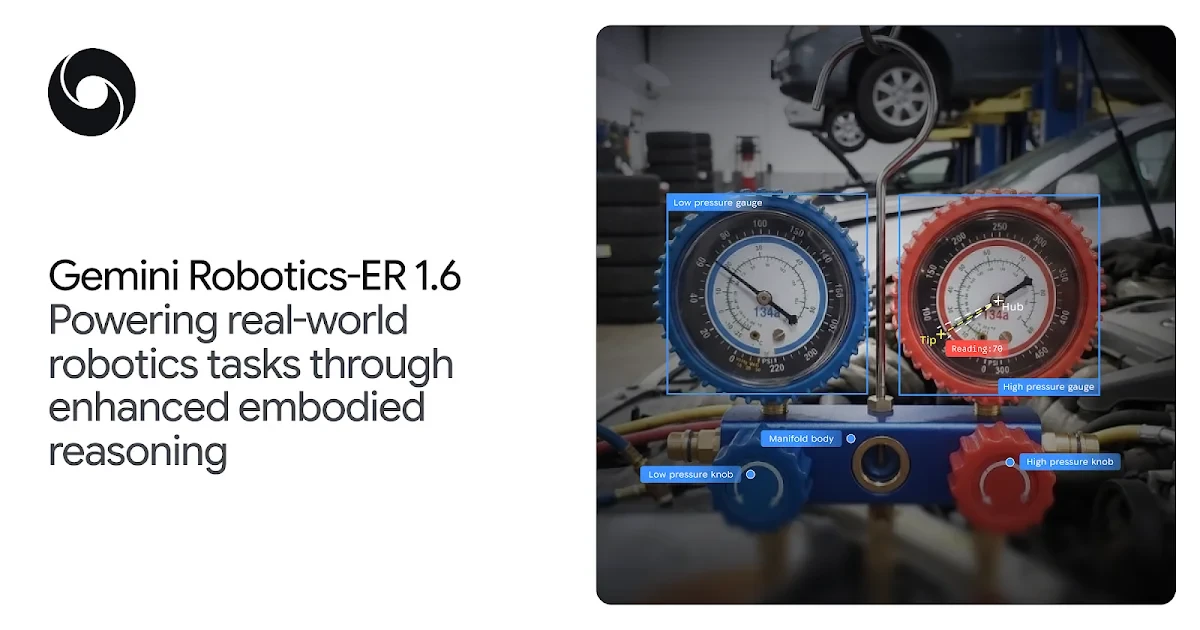
Gemini Robotics-ER 1.6 :通过增强具身推理赋能现实世界机器人任务
Google DeepMind 正式推出 Gemini Robotics 系列模型,标志着这家科技巨头在具身智能领域迈出关键一步。该模型延续 Gemini 家族在多模态理解和推理方面的优势,旨在解决具身智能的两大瓶颈:复杂环境泛化能力和长周期任务连贯性。 Google 意在抢占行业标准制定者位置,其优势在于成熟的多模态研发体系、充足算力及 Android 生态的边缘部署经验。真正的悬念在于开发者社区能否基于此模型推出超越实验室 demo 的实用应用。
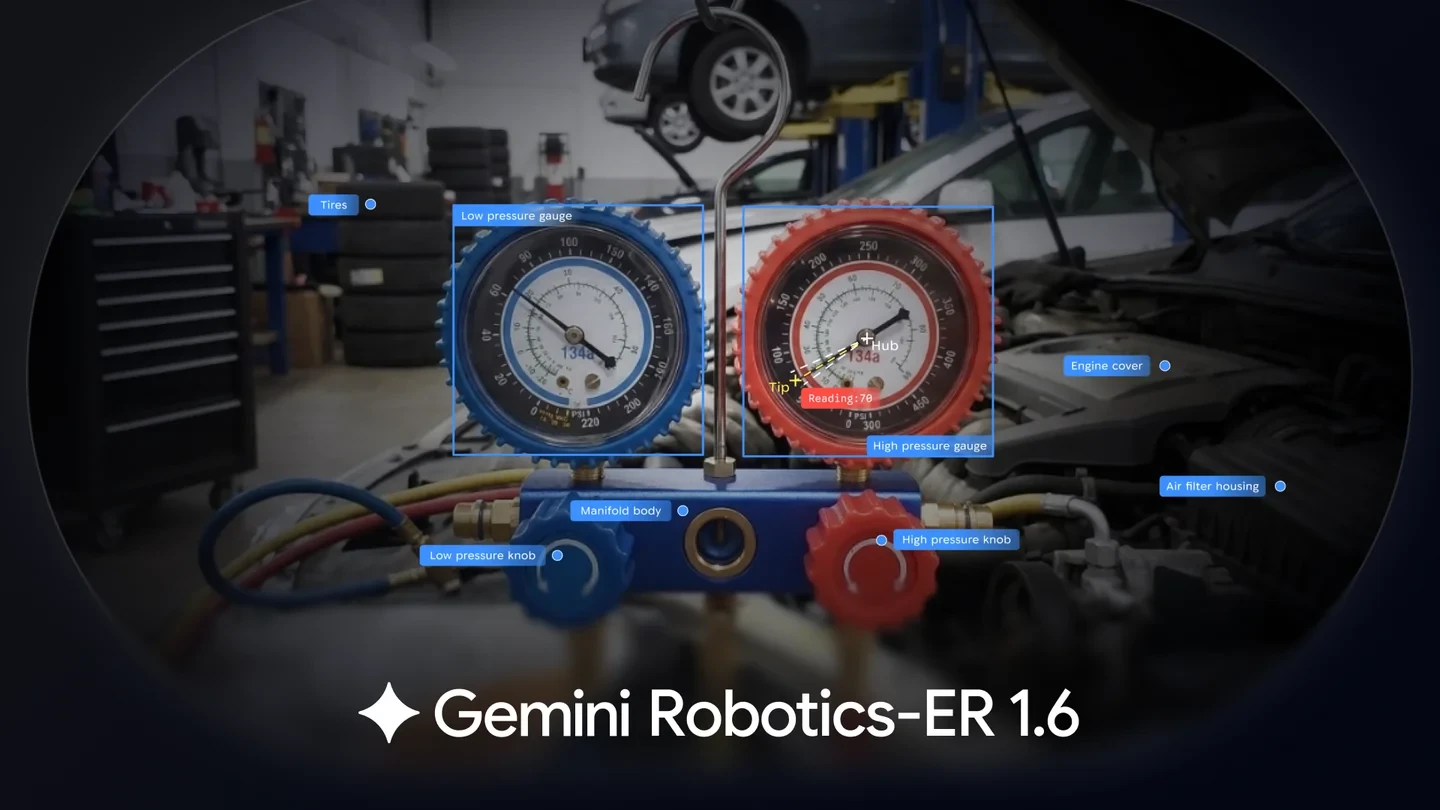
Gemini 机器人具身智能 1.6
Google DeepMind 发布 Gemini Robotics-ER 1.6 推理模型,专为机器人应用设计。该模型在空间逻辑、多视角理解和任务规划能力上实现突破,新增复杂工业仪表读数功能,得益于与 Boston Dynamics 的深度合作。安全性方面表现突出,成为 Google 最安全的机器人模型。此次发布表明大语言模型正加速向物理世界渗透, Google 以空间智能为切入点务实布局,而 Boston Dynamics 在真实环境部署方面的经验恰好弥补了互联网公司的短板。

什么是 JEPA ,它和世界模型有什么关系?
JEPA(联合嵌入预测架构)不生成像素或token,而是在潜空间中学习数据的抽象表示并预测状态变化,天然承担世界模型中的状态表征与动态预测功能。它更关注“理解与模拟”,而非“生成与表达”,为机器人、自动驾驶等需长期推理与多模态交互的系统提供更高效稳定的基础能力。

1X 发布最新世界模型,称为机器人 NEO 的认知核心
1X为机器人NEO推出全新世界模型,使其能基于视觉与人类交互视频预训练,在脑中预演符合物理规律的动作,再执行真实操作;支持多方案并行、动态环境适应及自我强化学习闭环,显著提升泛化能力与自主性。

2026 年 AI 发展趋势预测
IBM预测2026年AI将走向多智能体协同作业、数字员工规模化上岗及物理AI落地应用;社交计算催生人机共情的集体智能,可验证AI强化合规透明,量子计算开始融入实际工作流,边缘小模型实现本地高效推理,无定形混合计算推动软硬一体化演进。